| Il problema generale è
calcolare l'integrale I : Questo problema è risolto dal Teorema Fondamentale del Calcolo Integrale:
Tuttavia accade che non si riesce a trovare per via
analitica la primitiva o si possiede solo un
insieme di valori della f(x) ottenuti sperimentalmente
in corrispondenza di particolari valori della
variabile indipendente x. In questi casi occorre
utilizzare i metodi di integrazione numerica. Il
calcolo
dell'integrale diventa:
|
|||
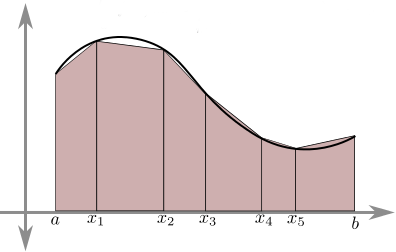
POLINOMIO DI PRIMO ORDINE: REGOLA DEL TRAPEZOIDE In questo caso, in ogni intervallo, il polinomio i-esimo è di primo ordine (un segmento di retta): in generale è: che è l'equazione della retta passante per due nodi [xi-1,f(xi-1)] e [xi,f(xi)]. |
 |
||
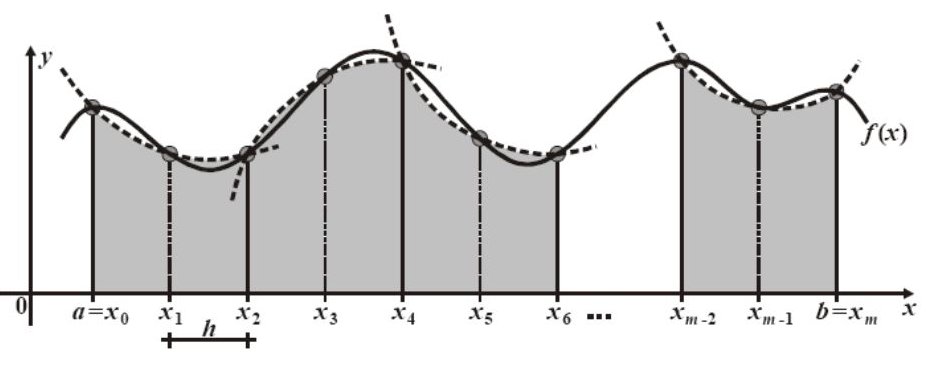
| Poiché i nodi sono
equispaziati calcoliamo la loro (costante)
distanza reciproca e la chiamiamo
Sostituendo nell' i-esimo integrale: E il calcolo dell'integrale diventa:Che è in definitiva la somma dell'area di n trapezi rettangoli. L'errore totale nell'i-esimo integrale si può stimare con la formula: con ξ un punto tra xi-1 e xi. Si può osservare che l'errore cresce con il cubo dell'ampiezza dell'intervallo. L'errore totale è:con <f''> il valore medio della derivata seconda. Si può osservare che, poiché l'errore è proporzionale a h², dimezzando l'ampiezza degli intervalli l'errore si riduce di un fattore 4 (ma ad un certo punto bisogna limitarsi a causa dell'errore di arrotondamento). |
|||
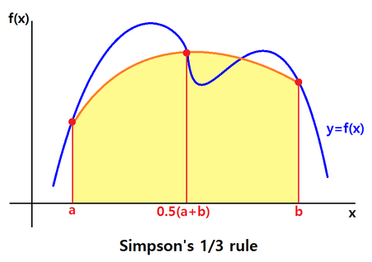
POLINOMIO DI SECONDO ORDINE: REGOLA DI SIMPSON 1/3 La successiva approssimazione è considerare in ogni intervallo un polinomio interpolante al secondo ordine (parabola): Tuttavia per definire una parabola sono necessari almeno tre punti. La più semplice scelta è considerare gli estremi dell'intervallo e il punto medio e poiché i nodi si suppongono equispaziati basta considerare tre punti consecutivi xi , xi + h e xi + 2h. Quindi, dati i tre punti, occorre ricavare i coefficienti a0, a1, a2 e poi calcolare l'integrale tra xi e xi + 2h. Il risultato è: |
 |
||
con . A causa del fattore 1/3 questa formula è detta Regola di Simpson 1/3. L'errore è In generale, se consideriamo un intero intervallo [a,b] con n nodi il calcolo dell'integrale diventa: |
 |
||
| con
.
Per ogni tre punti passa una diversa parabola
interpolatrice. L'errore totale è :con <fIV> il valore medio della derivata quarta nell'intervallo [a,b]. Poiché l'errore è proporzionale a h4 dimezzando l'ampiezza degli intervalli l'errore totale si riduce di un fattore 16 |
|||
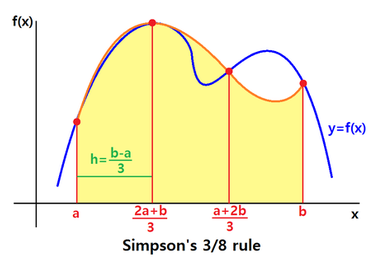
POLINOMIO DI TERZO ORDINE: REGOLA DI SIMPSON 3/8 In questo caso, in ogni intervallo, il polinomio è al terzo ordine (una cubica): Per definire una cubica servono quattro punti. In modo analogo per la Regola 1/3 si scelgono punti equispaziati (quattro): a= xi, (2a+b)/3= xi + h, (a+2b)/3= xi + 2h, b= xi + 3h. Poi, dati i quattro punti, occorre ricavare i coefficienti a0, a1, a2 e a4 e infine calcolare l'integrale tra a e b. Il risultato è: |
 |
||
| con
.
A causa del fattore 3/8 questa formula è detta Regola
di Simpson 3/8. In generale, se consideriamo un intero intervallo [a,b] con n nodi il calcolo dell'integrale diventa: con . Per ogni quattro punti passa una cubica interpolatrice.
|
|||
| L'ESTRAPOLAZIONE DI
RICHARDSON L'estrapolazione di Richardson rappresenta un metodo in cui si combinano tra di loro due diverse stime numeriche dell'integrale per ottenerne una più accurata, sfruttando la conoscenza dell'andamento dell'errore. Supponiamo di aver applicato un dato metodo per stimare un'integrale e abbiamo ottenuto due stime dell'integrale con due spaziature diverse, h1 e h2. Deve essere: con I(h) la stima dell'integrale e E(h) il suo errore di troncamento. Se abbiamo usato il metodo del trapezoide i due errori saranno del tipo : , supponendo indipendente da h il valore medio di f'' e poichè l'intervallo è lo stesso si ha: sostituendo l'errore del primo integrale e uguagliando i due integrali: si può ricavare : Abbiamo così ottenuto una stima dell'errore del secondo integrale che possiamo scrivere: Avendo una stima dell'errore sul secondo integrale possiamo migliorare la sua approssimazione. Per esempio se scegliamo h2= h1/2 la stima dell'integrale diventa:
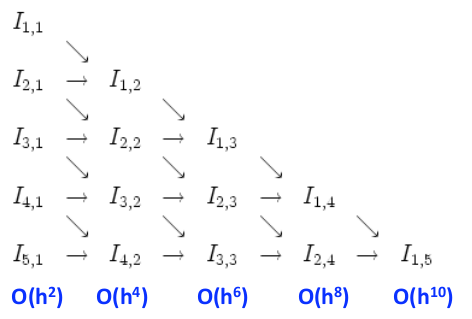
Il metodo può essere ulteriormente iterato. Se si sono ottenute due diverse stime con accuratezza O(h4) ottenute con h2= h1/2 queste possono essere combinate per ottenere una nuova stima che avrà accuratezza O(h6): Questo è un esempio di estrapolazione di Richardson che rappresenta un metodo in cui si combinano tra di loro due diverse stime numeriche per ottenere una più accurata, sfruttando la conoscenza dell'andamento dell'errore. L'algoritmo di integrazione di Romberg corrisponde all'implementazione numerica del metodo di estrapolazione di Richardson utilizzando sempre h2= h1/2. In generale i coefficienti necessari per generare le diverse stime possono essere scritti come: |
|||
k rappresenta l'ordine di accuratezza: con k=1 otteniamo una stima con errore O(h2), con k=2 otteniamo una stima con errore O(h4), con k=3 otteniamo una stima con errore O(h6) ecc.. j rappresenta il livello di accuratezza: j+1 è più accurato di j Per esempio consideriamo la stima (1). Dobbiamo calcolare I1,2 , per farlo utilizziamo le stime I1,1 e I2,1. I2,1 ha un livello di accuratezza superiore di I1,1 perchè h2= h1/2. Tutte e due hanno lo stesso ordine di accuratezza perchè k=1. |
 |
||
| Per ottenere la stima I1,3
occorre possedere le stime I1,2 e I2,2.
Questa volta l'ordine di accuratezza è O(h4)
per tutte e due le stime ma I2,2 deve essere
stata stimata con un intervallo pari alla metà
dell'intervallo con cui è stata stimata I1,2:
deve possedere un livello di accuratezza superiore. |
|||
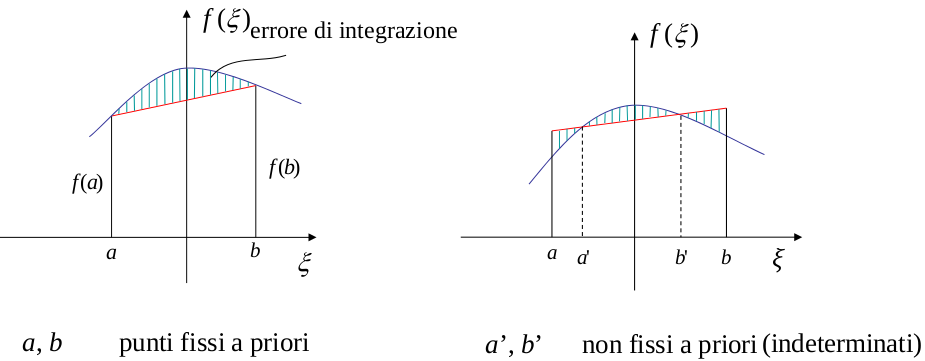
LA QUADRATURA DI GAUSS Nelle formule di Newton-Cotes l'integrazione numerica della funzione è sviluppata secondo punti predeterminati dall'ampiezza scelta h. Ma questo metodo non offre buoni risultati se la funzione non è regolare. |
|||
| Nella quadratura di Gauss, in un
determinato intervallo, l'approssimazione dell'integrale
può essere migliorata usando due punti interni
indeterminati scelti in modo da minimizzare l'errore di
integrazione. Per esempio, in un determinato intervallo la formula del trapezoide è: ma a e b non sono noti si può comunque scrivere: |
 |
||
| dove x0 e x1
sono due punti non noti interni all'intervallo di
integrazione e c0 e c1 sono
opportuni coefficienti da determinarsi. Per determinare questi due punti supponiamo che l'integrale della funzione dia un risultato esatto integrando analiticamente una funzione polinomiale del terzo ordine: L'integrale esatto è: L'integrale approssimato è: dal confronto dei due integrali derivano le condizioni: Per risolvere il sistema si può fare un cambio di variabile in modo che a=-1 e b= 1. Il sistema diventa: Risolvendo si ha: . Pertanto è la formula a due punti di Gauss-Legendre. Per tornare ai limiti di integrazione a e b è necessario fare il seguente cambio di variabile: I limiti di integrazione sono:Le soluzioni sono: e da cui e l'integrale è: |
|||
| In maniera analoga si possono
sviluppare versioni di quadratura di Gauss-Legendre agli
ordini superiori. Si può fare di meglio utilizzando tre punti interni all'intervallo. Si ha: I coefficienti c0, c1, c2 e le ascisse x0, x1, x2 sono calcolati assumendo che l'integrale è esattamente calcolato utilizzando il polinomio di quinto grado (occorrono sei equazioni lineari): e in questo caso, ponendo i limiti di integrazione a=-1 e b= 1, si ottiene: |
|||